

La pérdida del control sobre la trayectoria del vehículo es la principal causa de accidentes de tráfico a nivel mundial. Esta situación se produce por dos causas principalmente: la reacción incorrecta del conductor ante una situación inesperada y la superación del límite de adherencia de los neumáticos, pudiendo ser esta última consecuencia de la primera. La imprevisibilidad del entorno y la variabilidad de la calzada resultan los factores determinantes para la frecuencia y la magnitud de dichas situaciones de riesgo para el conductor, los pasajeros y el resto de usuarios de la vía pública.
La evolución de los sistemas electrónicos y de comunicación entre unidades permitió en 1995 la introducción de una nueva funcionalidad relacionada con el sistema de frenos. El control de estabilidad, conocido también como ESP de sus siglas en alemán Elektronische Stabilitäts-Programm. Este es una función distribuida que combina el trabajo de la unidad de control del motor y del ABS para corregir las pérdidas de trayectoria del vehículo que se producen por deslizamiento de los neumáticos incluso sin diferencia de velocidad considerable entre ellos.
El control de estabilidad evalúa las señales emitidas por nuevos sensores específicos para reconocer la desviación de la trayectoria real del vehículo respecto a la marcada por el conductor. Mediante el frenado selectivo de una o varias ruedas junto con la variación de par motor entregado procura recuperar la estabilidad del vehículo produciendo las fuerzas necesarias sobre los ejes y la carrocería.
Para que el vehículo se mantenga estable y realice la trayectoria marcada por el conductor, todas las fuerzas deben transmitirse al asfalto sin superar el límite de adherencia del neumático manteniendo el equilibrio con el eje contrario. En curva, para que un vehículo siga la trazada marcada por el volante, las fuerzas de guiado lateral deben ser superiores a la fuerza centrífuga.
El desplazamiento del vehículo es provocado por distintas fuerzas (impulsión, frenado, guiado, etc.) que son transmitidas al asfalto a través de los neumáticos. Las fuerzas inerciales (centrífuga en caso de una curva), se oponen al cambio de dirección del vehículo, modificando el reparto de pesos, de tal modo que se produce la adherencia asimétrica entre los neumáticos del mismo eje.
Si en algún momento se supera el límite de adherencia del neumático, este comenzará a deslizar, reduciendo la transmisión de fuerzas a la calzada. En el instante que existe un desequilibrio de fuerzas entre ambos ejes del vehículo o entre las ruedas de un mismo eje se produce un momento de fuerza sobre el centro de gravedad del vehículo, como si de un brazo de palanca se tratase, que produce la guiñada del vehículo (movimiento sobre su eje vertical) junto con el posible deslizamiento lateral. El par de guiñada modifica el giro del automóvil, alejándolo de la trazada marcada por el conductor, pudiendo derivar en la pérdida de control de la trayectoria del mismo. Los resultados en estas circunstancias pueden ser dos:
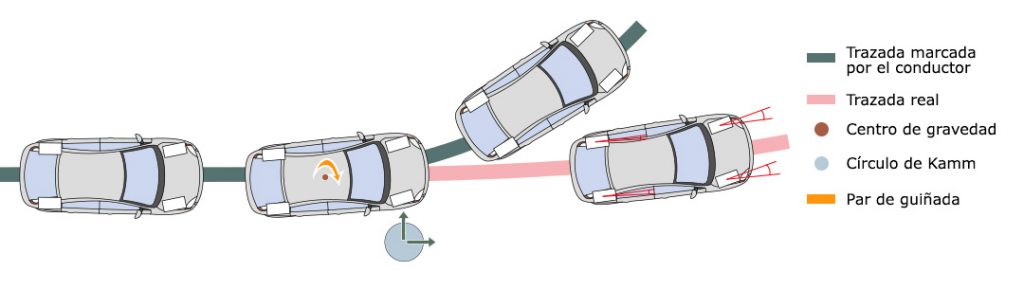
Subviraje: el vehículo realiza una trayectoria más amplia que la marcada por el conductor al rebasar la adherencia del eje delantero, que permite el deslizamiento y la pérdida de direccionalidad. En este caso, la diferencia entre la trayectoria recorrida y el eje longitudinal del vehículo o rueda (ángulo de deriva) es mayor en el eje delantero respecto al trasero.
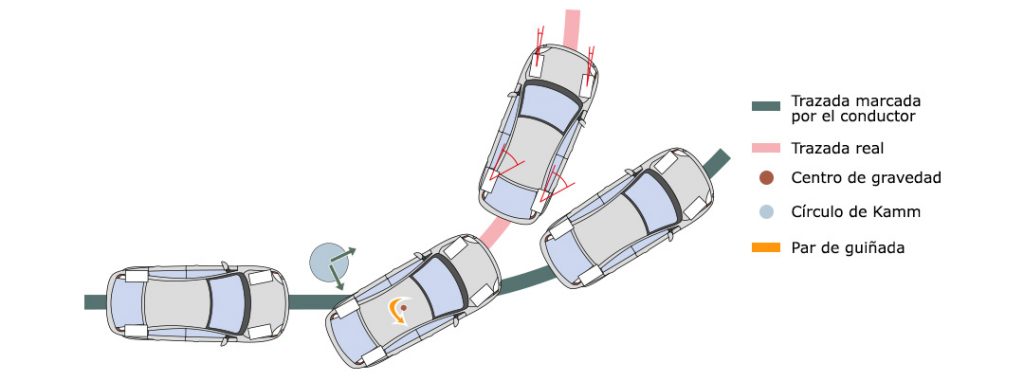
Sobreviraje: el vehículo recorre una trayectoria más cerrada que la señalada por el conductor a causa del deslizamiento de una o ambas ruedas del eje trasero. Durante este fenómeno se aprecia un mayor ángulo de deriva en el eje trasero respecto al delantero.
La fuerza lateral, la aceleración transversal y el ángulo de deriva no pueden ser modificados directamente por el sistema de frenado. Sin embargo, sí se puede generar un nuevo par de guiñada para contrarrestar el que provoca la falta de adherencia del tren afectado, reduciendo de este modo el ángulo de deriva y la rotación del vehículo sobre sí mismo. El sistema ESP calcula y produce las fuerzas necesarias actuando sobre una o varias ruedas para corregir en la medida de lo posible la trayectoria del vehículo.
Al igual que ocurre con el ABS, la lógica de funcionamiento de los diferentes sistemas de ESP es muy similar independientemente del fabricante o versión. La lógica de detección se basa en comparar la trayectoria teórica del vehículo (intención de guiado del conductor), con la trayectoria que realmente realiza para reconocer si existe una desviación significativa que indica la pérdida de estabilidad.
El sistema calcula los parámetros correspondientes a la trayectoria deseada por conductor basándose en la velocidad del vehículo, la posición del volante y los datos memorizados en la unidad. La trayectoria real se evalúa en función de la velocidad de las ruedas, cuya diferencia define el radio de la curva. Estos valores son monitorizados y comparados constantemente por la unidad de control, iniciando el ciclo de intervención si se produce una desviación suficiente entre ambos o una aceleración anormal de la carrocería del vehículo que indique su desplazamiento lateral o sobre su propio eje.
El sistema calcula la orientación y la magnitud de las fuerzas de reacción necesarias para reducir las que provocan la pérdida de estabilidad del vehículo, realizando el frenado de una o varias ruedas junto con la reducción de par motor si es necesario. Sobre las ruedas motrices, el frenado de una de las ruedas provoca el aumento de par de transmisión sobre la contraria, generando un potente par de guiñada sobre el eje regulado. El frenado cruzado consigue fuerzas de guiñada sobre la carrocería que permiten contrarrestar las que se producen por pérdida de adherencia de uno de los ejes.
Tras el trabajo de regulación, se comprueba nuevamente el estado del vehículo para comprobar si la intervención ha tenido éxito. En caso afirmativo, finalizará la intervención, pasando nuevamente al estado de supervisión continua. En caso contrario, se calcularán y realizarán las intervenciones pertinentes como si de acciones aisladas se tratasen.



